Hem acceptat constantment que la tecnologia ha de ser accessible per a tothom i definitivament, ja sigui gent normal o persones amb capacitat especial. L’avantatge fonamental de la innovació és atraure i millorar els individus, no per conquerir-los, sinó per ajudar-los.
Inicia la sessió al text
Les persones amb incapacitat per parlar utilitzen diferents mitjans de comunicació per transmetre els seus missatges. El més comú és el llenguatge de signes. El llenguatge de signes és un llenguatge que utilitza la modalitat gestual per transmetre un missatge. El llenguatge de signes és comú entre les persones que no saben parlar ni escoltar. Així doncs, aquí teniu un projecte que us ajudarà a traduir el llenguatge de signes a un text que altres persones puguin entendre.
Com s'utilitza Arduino per crear un traductor de signe a text?
Ara anem a recopilar més dades, analitzar-les, crear un circuit i gravar el codi al microcontrolador.
Pas 1: requisits previs
Abans de començar a treballar, és millor recollir i estudiar els aparells que farem servir. A la llista següent es mostren tots els elements que necessitem en aquest projecte.
- Arduino UN
- Filferros de pont masculí / femení
- Resistències (470 ohms)
- Taula de pa / Veroboard
- Capçaleres femenines
- Guant
Pas 2: Configuració de l'aparell
Utilitzarem sensors Flex per detectar el gest. El sensor de flexió és un sensor que proporciona una resistència diferent i un angle diferent cada vegada que es doblega. Té dos pins connectats en una configuració de divisor de tensió. La connexió d’aquests pins a l’Arduino es mostra a continuació.
Esquema de connexions
FLEX 1, FLEX 2, FLEX 3, FLEX 4, FLEX 5 són els sensors de flexió, i RES1, RES2, RES3, RES4, RES5 són les resistències de 470 ohms. Un punt de tots els sensors de flexió és comú i se li aplica 5V. A l’altre extrem, una pota de totes les resistències és comuna i està connectada a terra. L’entrada als pins Arduino rebrà dades analògiques de 0 a 1023 que es convertiran a la forma digital del codi.
Ara, com sabem com funciona un sensor de flexió, fixeu tots els sensors de flexió als dits del guant (eviteu utilitzar adhesius). Els cables de pont de soldadura a tots els sensors de flexió i els connecten al Veroboard tal com es mostra a la imatge anterior. Soldeu les connexions amb cura i realitzeu una prova de continuïtat. Si falla la prova de continuïtat, torneu a comprovar les connexions soldades i solucioneu-les.
Pas 3: Introducció a Arduino
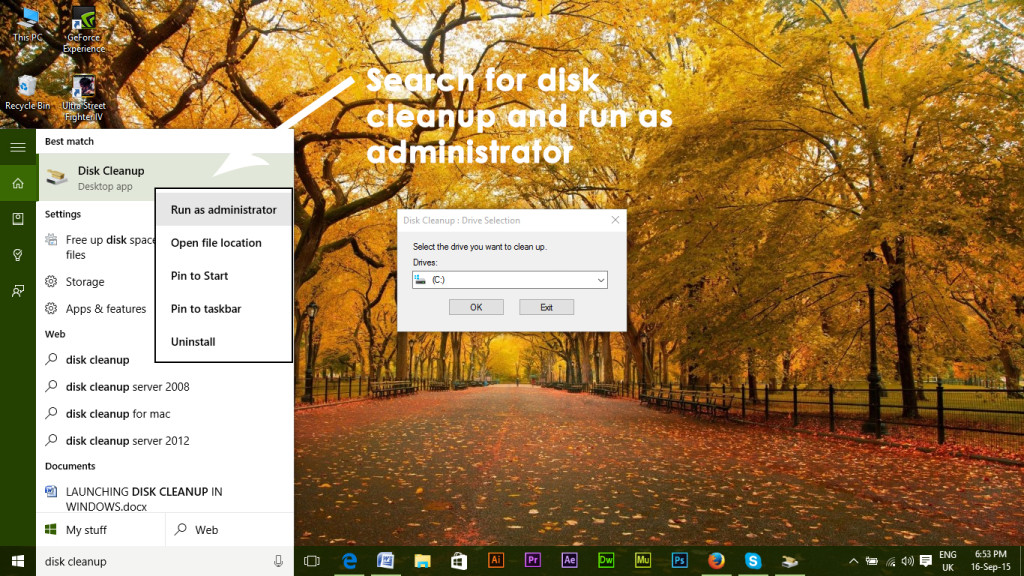
Si no teniu l’IDE Arduino, descarregueu la versió més recent de Arduino
- Connecteu l'Arduino amb l'ordinador i aneu a Tauler de control> Maquinari i so> Dispositius i impressores per comprovar el nom del port al qual està connectat Arduino. Al meu PC és COM14. Pot ser diferent al vostre PC.
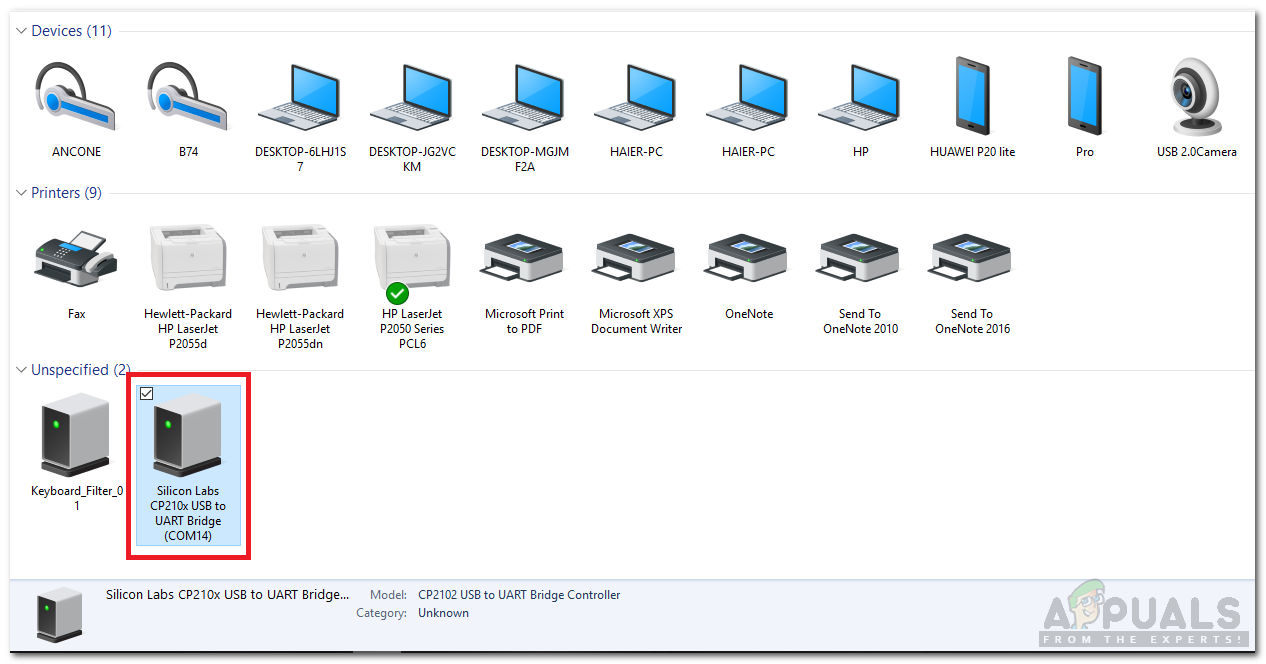
Cerca del número de port
- Obriu el vostre IDE Arduino i configureu el tauler a 'Arduino / Genuino Uno'.
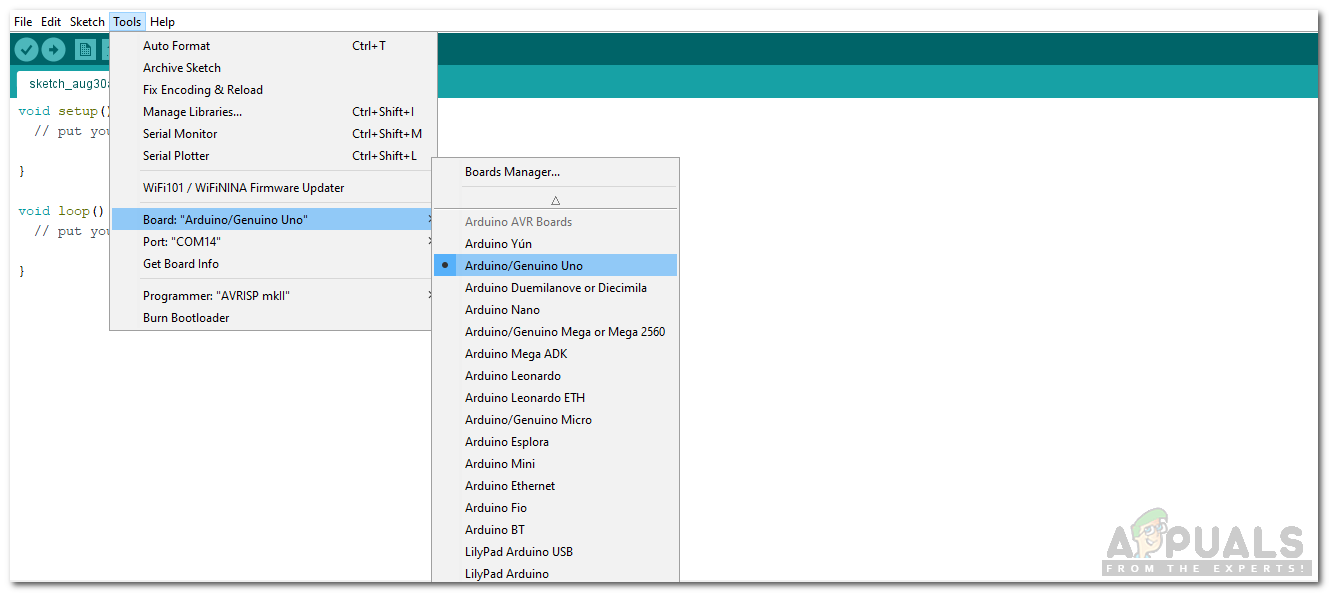
Taula de configuració
- Obriu el vostre ID Arduino i configureu el port que observeu abans al vostre PC.
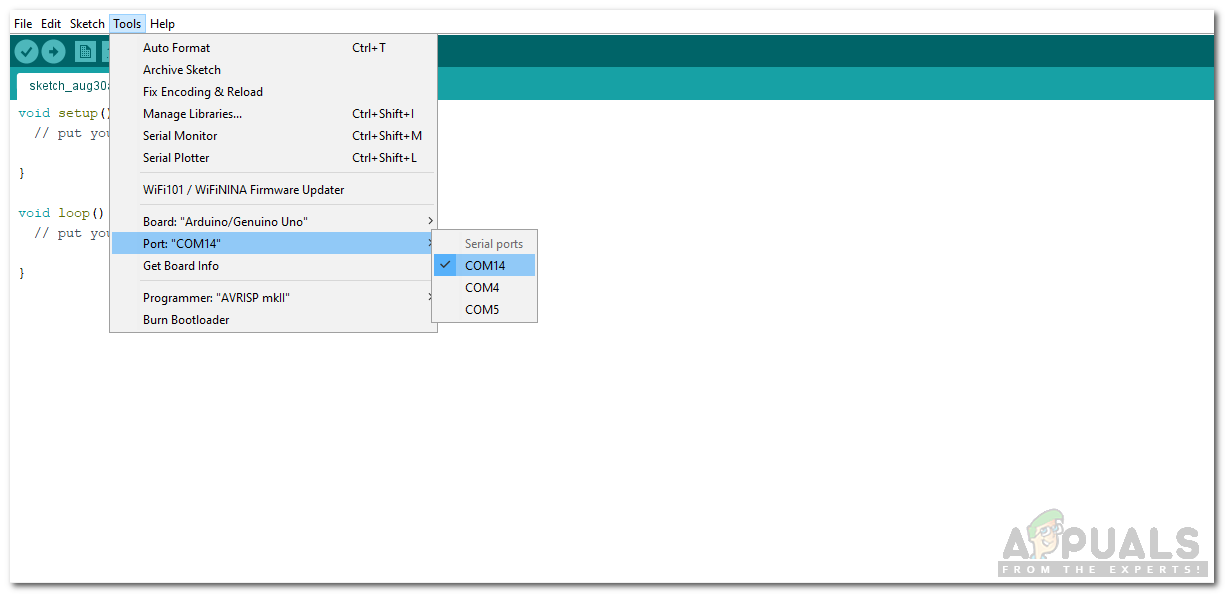
Configuració del port
- Ara baixeu el codi adjunt a continuació i pengeu-lo a la vostra placa Arduino fent clic al botó Puja.
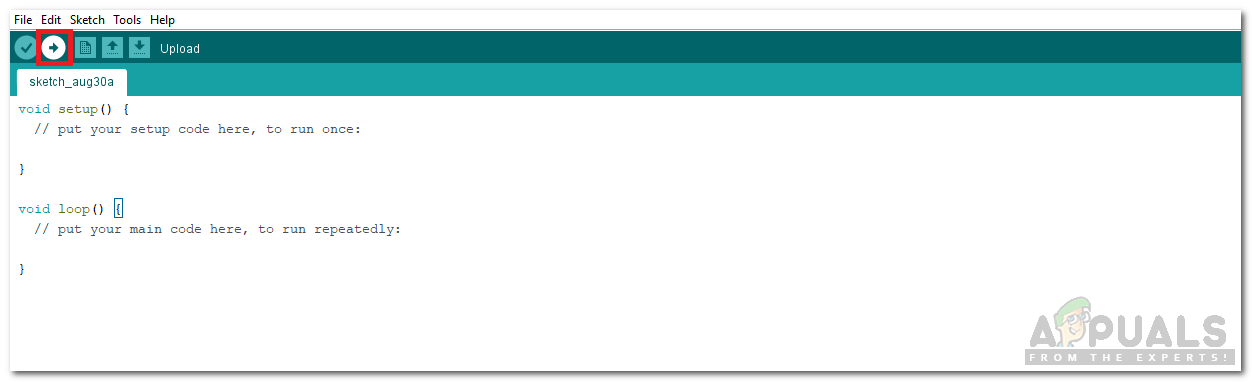
Pujar
Enllaç de descàrrega: Clica aquí
Pas 4: Codi
El codi està ben comentat, però aquí teniu una explicació general sobre el seu funcionament.
- Al principi del codi, s’inicialitzen 5 pins analògics d’Arduino per utilitzar-los amb els sensors flex. Més que el Vcc de l'Arduino i s'inicialitza la resistència de 4.7k ohm que s'utilitza al circuit. A continuació, s’inicialitza la resistència del sensor de flexió recta i la resistència en un angle de 90 graus. Aquestes inicialitzacions seran útils per escriure el codi.
- configuració nul·la () és una funció en què inicialitzem la velocitat en bauds de l’Arduino i tots els cinc pins analògics s’inicialitzen per utilitzar-los com INPUT. La velocitat de transmissió és la velocitat a la qual es comunica el microcontrolador.
- bucle buit () és una funció que s'executa contínuament una i altra vegada en un cicle. En aquesta funció, es llegeixen tots els valors analògics i es converteixen en valors digitals. Llavors, la resistència es calcula mitjançant la fórmula del divisor de tensió i, mitjançant aquesta resistència, es calcula l’angle de flexió del sensor de flexió.
Un cop hàgiu entès i penjat el codi, utilitzeu els guants i feu diferents gestos per traduir-los al text. Al codi, podeu afegir més combinacions de moviment dels dits que vulgueu i mostrar el missatge en conseqüència. Veureu que el vostre idioma de signes ara es converteix en text.
Pas 5: avançat
Aquest projecte tracta de convertir el llenguatge de signes a text i mostrar-lo al monitor sèrie. Com que el microcontrolador utilitzat és Arduino, aquest dispositiu només funcionarà quan l’Arduino estigui connectat al PC mitjançant un cable de dades perquè Arduino no té un mòdul WiFi integrat. Per fer aquest projecte una mica més interessant, podeu afegir un mòdul WiFi extern o utilitzar un mòdul ESP en lloc d’Arduino i desfer-vos del cable de dades i gaudir d’una traducció de senyal a veu mitjançant WiFi.